 Hnací kolejová vozidla
Hnací kolejová vozidla
- Hnací kolejová vozidla 2-osá - řada 211
- Hnací kolejová vozidla 3-osá - A 314
- Hnací kolejová vozidla 4-osá - A 415
Speciální hnací kolejová vozidla pro lehký posun a manipulaci se železničními vozy určená pro zajištění technologické obsluhy výroby v místě nakládky a vykládky. Lanová posunovací zařízení
Lanová posunovací zařízení
- Lanové posunovací zařízení LTV-PV
- Lanové posunovací zařízení LTV-NV
- Lanové posunovací zařízení PZ 15
Lanová posunovací zařízení jsou určena k posunu železničních vozů na nakládce a vykládce železničních vleček i na stáčištích kapalných produktů. Jsou schopna dle místních podmínek uvést do pohybu a ubrzdit soupravu vozů o celkové hmotnosti až 1200 t, zařízení PZ 15 - až 480 t. Speciální zařízení
Speciální zařízení
- Dynamický manipulátor HW1E
- Elektromechanická vozová zarážka EMVZ-02
- Kolejový aretační mechanismus KAM-60-8
Dynamický manipulátor HW1E byl vyvinut pro rotační výklopníky vagonů k zachycení a zastavení vjíždějících naplněných vagonů, pro jejich ustavení a vyklopení k následnému vysunutí.
Elektromechanická vozová zarážka EMVZ-02 zabezpečuje kolej, je ovládána dálkově, eliminuje obsluhu v místě.
Mechanický aretační systém KAM-60-8 je určen pro aretaci a držení nepohybujících se vagonů na tratích se sklonem v průběhu operace s jednotlivými vagony.
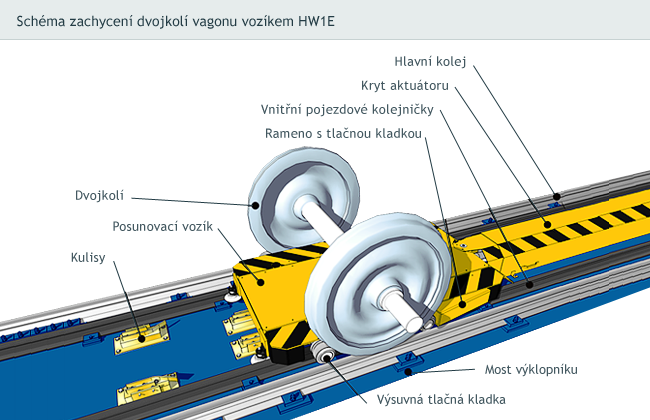
Dynamický manipulátor HW1E
Dynamický manipulátor HW1E byl vyvinut pro rotační výklopníky vagonů k zachycení a zastavení vjíždějících naplněných vagonů, jejich ustavení a po jejich vyklopení k jejich následnému vysunutí. Důležitou podmínkou je dodržení stanovené rychlosti vjíždějících vagonů, kterou může zaručit např. lanové posunovací zařízení před výklopníkem.
Základní popis
Hlavními skladebnými prvky dynamického manipulátoru jsou posunovací vozík, elektrický aktuátor s pístem, vnitřní kolejničky, kulisy a rozdělovač s řídícím systémem.
Posunovací vozík HW1E vychází z konstrukce zařízení LTV-PV a je doplněn o čidla snímající najetí dvojkolí vagonu na zadní tlačná ramena vozíku. Přední válečky vozíku brzdí vtlačený vagon (nebo dvojici vagonů), který je rameny zachycen a následně ustaven vozíkem v určeném místě. Po obrátce bubnu výklopníku s vagonem, jeho vysypání a otočení do původní polohy dochází k dynamickému vysunutí vagonu. Jakmile zařízení HW1E s vagonem dosáhne konce své pojezdové dráhy, najede na kulisy a zasune všechny tlačné kladky, takže kola vagonu mohou volně projíždět a vagon opustí výklopník.
Technický popis
Základním prvkem tohoto systému je elektrický aktuátor jako akční člen vytvářející tlačnou nebo tažnou sílu vůči vztažnému bodu. Princip aktuátoru vychází z převodu rotačního pohybu na lineární. Píst aktuátoru je schopen kroku až 1750 mm.
Motor, jeho brzdící síla, rychlost vysouvání pístu (vozíku) je řízeno řídicím systémem. Frekvenční měnič umožňuje výběr z různých režimů provozu a je schopen s elektromotorem zajistit potřebné zrychlení posunovacího vozíku. Během brzdění pracuje elektro-dynamická brzda EDB, která získanou el. energii přemění v tepelnou. Poloha vozíku je v každém okamžiku detekována enkodérem umístěném na zadním válci elektromotoru a jeho nadřazený řídící systém spolupracuje s lanovými posunovacími zařízeními před výklopníkem.


stáhnout typový list »
vyplnit dotazník pro konkrétní specifikaci zařízení »
Speciální zařízení
| Dotazník | Typový list | Fotogalerie |
| Základní technické údaje HW1E | ||
|---|---|---|
| Manipulace pro | 1 vagon | 2 vagony |
| Výkon elektromotoru | 13,2 kW | 15 kW |
| Max. brzdící síla | 33 kN | 54 kN |
| Max. tlačná síla | 10 kN | 12 kN |
| Max. hmotnost vagónu | 80 t | 190 t |
| Max. rychlost vjížděj. vagónu | 1 m/s | |
| Max. délka posunu vozíku | 1500 mm | 1750 mm |
| Celková max. délka zařízení | 7 000 mm | |








Mostárenská 2917/40
703 00 Ostrava-Vítkovice
tel.: +420 601 302 840




